Hi, I want to convert a list using python. I have a list of list like this: Read more
0
0
Please briefly explain why you feel this question should be reported.
Please briefly explain why you feel this answer should be reported.
Please briefly explain why you feel this user should be reported.
We want to connect the people who have knowledge to the people who need it, to bring together people with different perspectives so they can understand each other better, and to empower everyone to share their knowledge.
Hi, I want to convert a list using python. I have a list of list like this: Read more
Hello, Please can you tell me how to disable the popup which show system alarm. It appear when an alarm is triggered (door open, emergency stop…). The project is developped using Tia portal V17. It shows up brefielly and disappear. It’s really annoying. Thank you.
Hi, The problem is solved by deleting the screeens from global screens. thanks for everyone
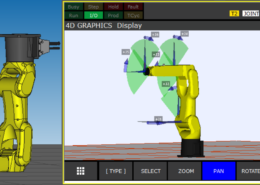
Hello, Is it possible to change to orientation of an inverted mounting robot. I need to see the robot using 4D graphics in the TeachPendant exactly as it phisically mountend. It’s really helpful to easilly jog the robot. Thank you for your help

Hi, Go to SYSTEM => SYSTEM Variables => CELL_GRP => CELL_GRP_T : you can change the values of XYZ WPR to adjust the mounting in the 4D graphics. It only adjust the view. but please, if you have a inverted mounted robot, You must controlled start => maintenace “mount angle setting” you haRead more
Hi,
Go to SYSTEM => SYSTEM Variables => CELL_GRP => CELL_GRP_T :
you can change the values of XYZ WPR to adjust the mounting in the 4D graphics. It only adjust the view.
but please, if you have a inverted mounted robot, You must controlled start => maintenace
“mount angle setting” you have to choose 180 (Upside down)
Have a nice day
See lessHi, What is the difference between P_TRING and |P| ladder instruction. and why I should affect a tag below the two instructions? Thanks for replies
Hi, use P_TRIG to monitior everything in the left of this instruction. It turns to ON for one scan when the entire set of logic to the left goes from off to on use -|P| to monitor a single tag. it turns on one scan when the tag goes from off to on. Best regards
Hi,
use P_TRIG to monitior everything in the left of this instruction. It turns to ON for one scan when the entire set of logic to the left goes from off to on
use -|P| to monitor a single tag. it turns on one scan when the tag goes from off to on.
Best regards
See lessHi Everyone! I use a s7-1500 controller. I use MB_CLIENT function to read data from an other PLC. Everything work fine until I make change in my project and download to the PLC. I have error 80A3 and impossible to acknowledge until I make a stop/Run of the plc. Anyone can help me? Best Regards,
Hi Maesa, If you use instances declared in a FB function. Try to use a global instance of MB_clien like this: use a global DB to declare the "ModbusDataconnectParamClient" structure. This will fix your problem and when you download the project, it will not cause problem for MB_client function. hopeRead more
Hi Maesa,
If you use instances declared in a FB function.
Try to use a global instance of MB_clien like this:
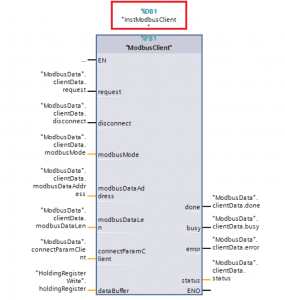
use a global DB to declare the “ModbusDataconnectParamClient” structure.
This will fix your problem and when you download the project, it will not cause problem for MB_client function.
hope this will help you
See lessPlease login to vote and see the results.

Hi, I am a plc programmer and I want to learn industrial robots programming. Please tell me which robot I start to learn first. thanks
Please login to vote and see the results.
Hello, For my house, I need an an easier fence to install I am planning to build a new fence. which should you choose wood or vinyl? Thank you very much
Hello this code may help you: def flatten_list(original_List): flat_list = [] for sub_list in original_List: for element in sub_list: flat_list.append(element) return flat_list #test original_List=[['a', 'b', 'c', 'd','e'], ['f', 'g', 'h', 'i'], ['j', 'k', 'l'], ['m', 'n', 'o']] print('original listRead more
Hello
this code may help you:
See less